
Förderjahr 2024 / Projekt Call #19 / ProjektID: 7394 / Projekt: RoboSim5G
RoboSim5G now includes a UE plugin for Gazebo, enabling full end-to-end 5G network simulation with mobile robots. Robots connect to simulated gNBs and 5G cores using a containerized setup with real 5G behavior.
RoboSim5G Now Supports End-to-End 5G Network Simulation for Robots
The RoboSim5G team has reached a major milestone: the User Equipment (UE) plugin is now available. This completes the end-to-end 5G framework RoboSim5G and enables a fully virtualized 5G network, covering robot as UE, base station, and the core network, entirely within the Gazebo simulator. This allows developers to test 5G-based robotic applications without any physical infrastructure.
What’s New?
Previously, RoboSim5G supported the simulation of realistic 5G base stations (gNBs) within Gazebo. With the release of the UE plugin, it is now possible to attach 5G user equipment to mobile robots in the simulation. This plugin allows a robot to connect to a 5G network by launching a container that runs both the robot’s control logic and a persistent 5G UE process. As a result, robotic applications can now incorporate real 5G behavior in a fully virtual environment.
How It Works
The UE plugin is integrated via the SDF world file and automates the entire setup: it launches the robot container, configures the UE, builds the Docker image, and establishes all required network connections. Inside the container, the robot’s internal logic and the UE process run simultaneously, fully connected to the simulated gNB and OAI 5G core. ROS 2 discovery is supported over 5G using a Fast DDS server.f
Getting started with RoboSim5G
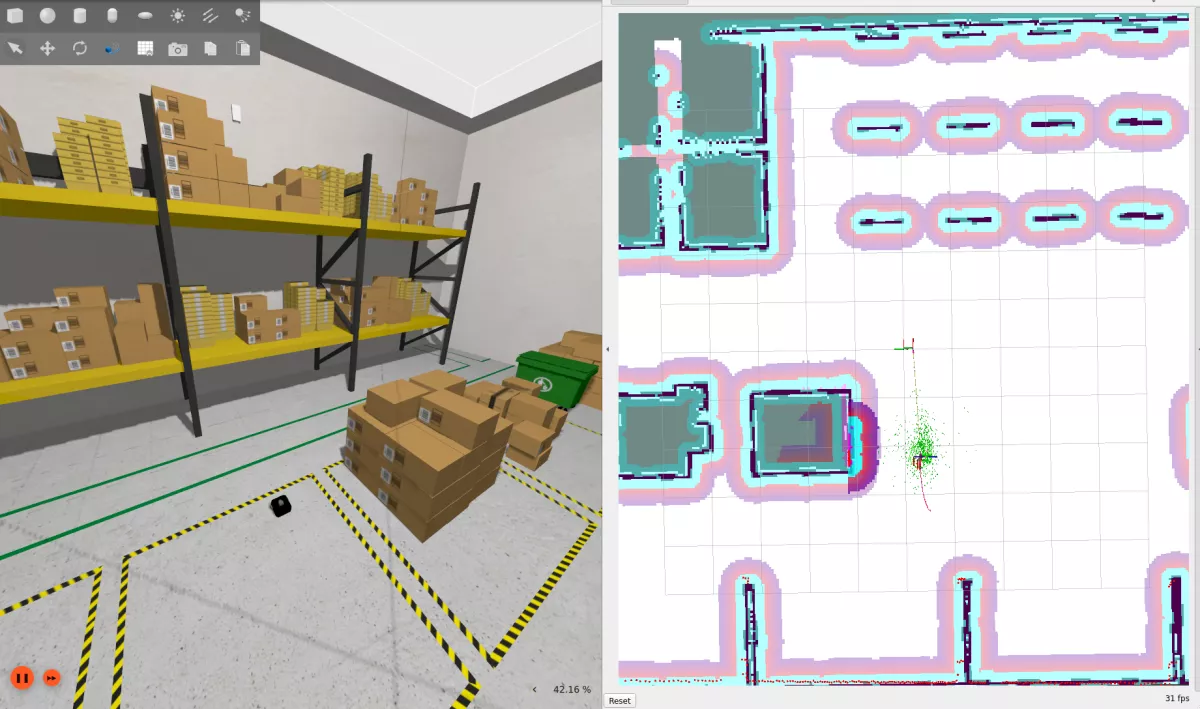
All RoboSim5G components, including the new UE plugin, are available in our GitHub repository at https://github.com/phinetech/RoboSim5G. The repository includes a demo showcasing a TurtleBot navigating a warehouse using Nav2, receiving navigation goals via a remote RViz session over the simulated 5G network. Both UE and gNB plugins are used in this setup, demonstrating a fully virtualized, end-to-end 5G setup in Gazebo.
What's next?
With the end-to-end simulation in place, RoboSim5G is now focused on extending the functionality of the 5G simulation environment.
One upcoming feature is support for 5G-based localization. Using the simulated gNBs, it will be possible to calculate positions based on simulated signal data. The goal is to provide position information that reflects the robot's actual location in Gazebo, enabling evaluation of localization features based on 5G data.


