
Förderjahr 2024 / Projekt Call #19 / ProjektID: 7394 / Projekt: RoboSim5G
We are excited to announce our latest update, which introduces powerful new Graphical User Interface (GUI) plugins designed to give developers direct control and real-time visibility over their simulated 5G networks.
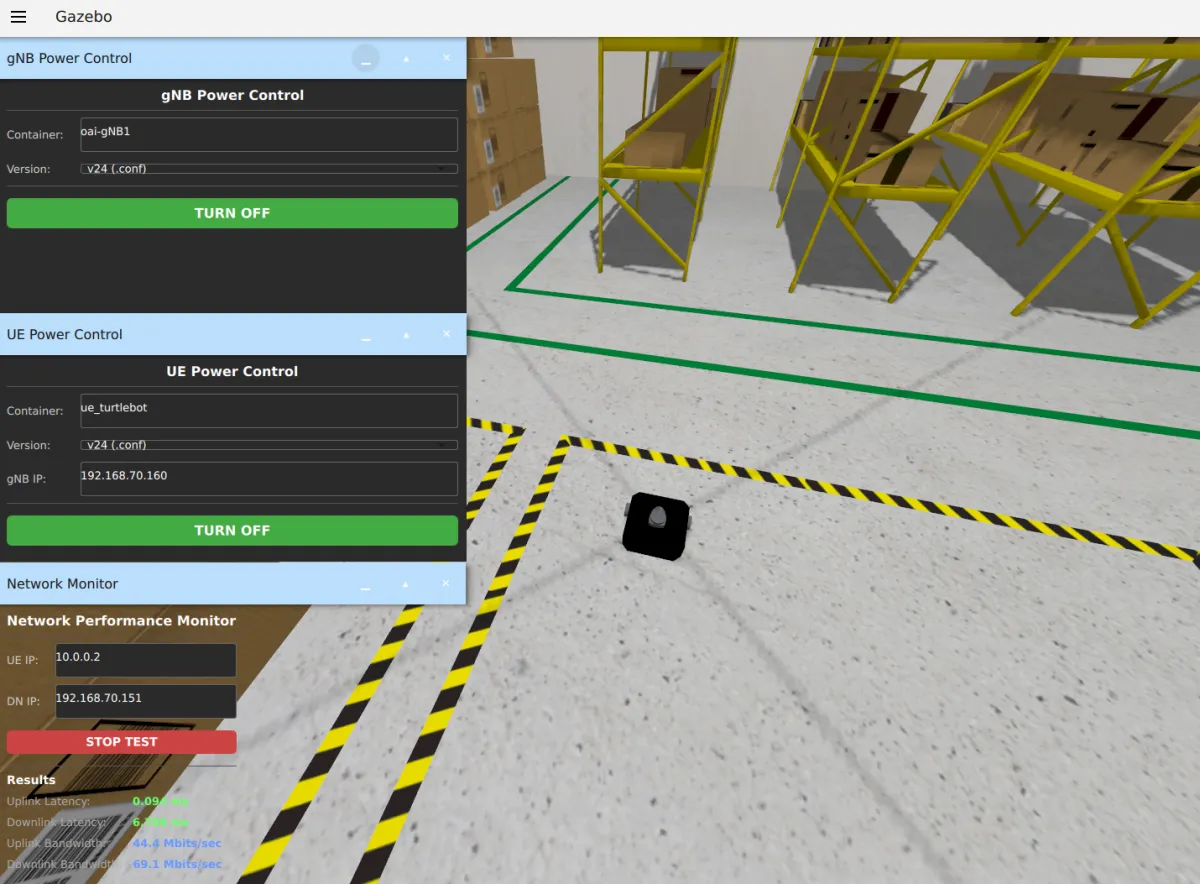
Measure Bandwidth and Latency Live in Gazebo
When developing 5G robotic applications, knowing that a connection exists isn't enough, you need to know how it performs. To address this, we have added the new monitoring Gazebo GUI plugin.
This plugin serves as a built-in network monitoring tool, allowing users to continuously track performance metrics between two containers directly from the Gazebo interface.
- Latency Tracking: Real-time latency measurement using
ping. - Bandwidth Monitoring: Throughput testing powered by
iperf.
By providing these metrics live within the simulation environment, robotic developers can instantly observe how network performance like bandwidth drops or latency spike affects robot behavior, navigation, and sensor data streams without needing to jump between external terminal windows.
Seamless Control: Toggle UE and gNB Processes
Alongside performance monitoring, we’ve significantly simplified network management during testing. Previously, managing the underlying 5G processes required manual intervention. With this update, we are introducing two dedicated Gazebo GUI plugins that allow you to switch the OpenAirInterface (OAI) UE and gNB processes on and off with a simple click.
This interactivity makes it incredibly easy to test network disruption scenarios. Want to see how your robot's autonomous navigation handles a sudden loss of the base station? Simply toggle off the gNB process from the GUI and watch the robot's logic react in real time.
What's Next?
This update represents a major leap in usability, moving RoboSim5G from a static simulation framework to a highly interactive testing environment. As we continue to refine the project, we are focusing on further integrating advanced 5G features, including enhanced signal-based localization and more complex QoS testing scenarios.
All updates are currently live. Visit our GitHub repository at https://github.com/phinetech/RoboSim5G to pull the latest changes, explore the new GUI tools, and take your 5G robotics simulations to the next level!




